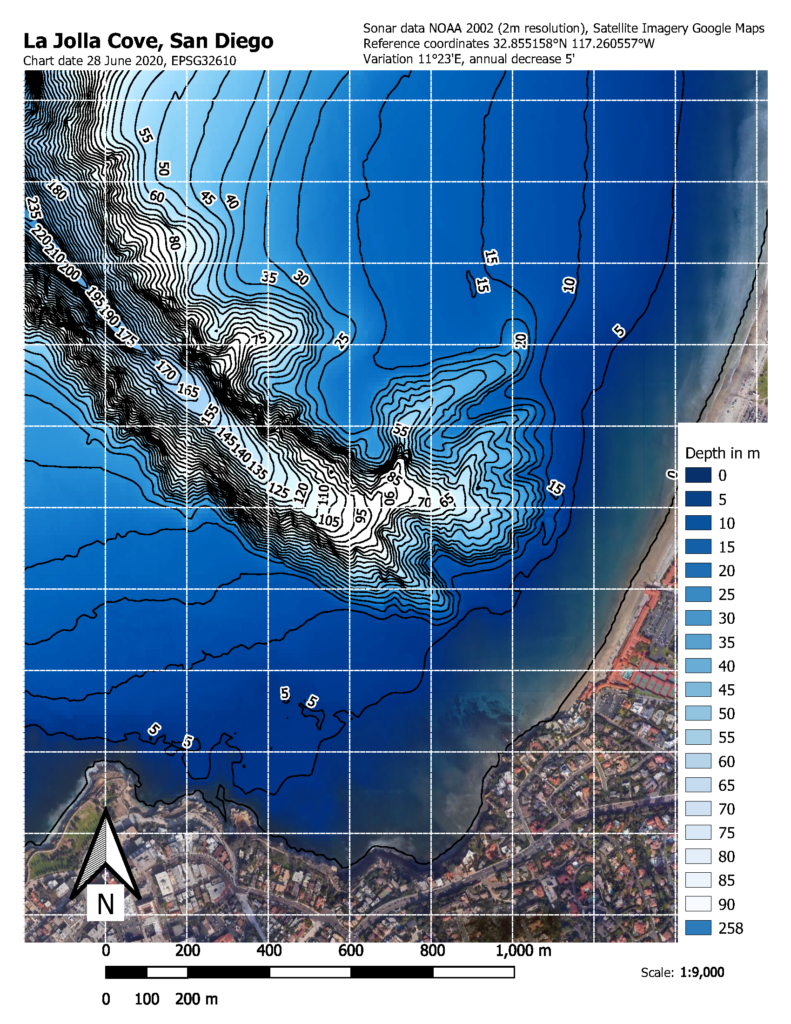
On the internet, you can find numerous tutorials on how to clip data sets in QGIS, extracting contours, and assigning symbology, e.g. only to display bathymetry data and to omit any elevations above sea level. The book “Discover QGIS 3.x: A Workbook for Classroom or Independent Study” is highly recommended reading. Once this base layer is available, you can start adding points of interest: entry/exit points, buoys, significant points, and whatever else you deem useful.
If you want to acquire your own data, the cheapest way is to use a castable, inexpensive fishing sonar with GPS sensor. These devices will provide you with X and Y coordinates and the corresponding depth in a CSV file. Deeper makes such sonars (Smart Sonar) starting at about 200 USD. The minimum model you need is the “Deeper Smart Sonar PRO+ with GPS for Professional Fishing” as it is the smallest model equipped with GPS.
Be careful though as not all manufacturers of fishing sonars allow you to download the bathymetric data like Deeper does. Many store the data in proprietary formats, making them hard or even impossible to process.
Before importing a file into QGIS, you need to manually check it for obvious errors, e.g. when the device did not have a satellite-based position, it will often provide data with a position of 00°N/000°E/W. You need to delete these values in the spreadsheet software of your choice.
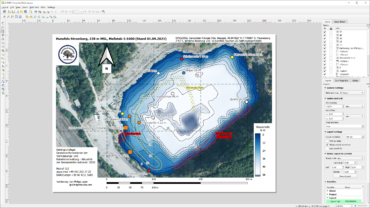
Once you have the file cleaned up, you can process it directly in QGIS:
1. Import the file as a CSV-Layer
2. Save as Geopackage (makes the next step faster)
3. IDW-Interpolation and save the result as raster
If you are unable to get a CSV file from the device, you may be able to process it with ReefMaster as it supports some proprietary sonar data formats. However, a ReefMaster license costs about 200 USD.
Another consideration is the use of Web Mercator projection in Google Earth, Bing Maps, etc. Web Mercator is not entirely conformal so if you have access to precision instruments like a sextant, real-world angles will slightly differ from what you measure in these online mapping tools. The error is only about 1 to 2° but still something to consider.